视频监控:基础方案
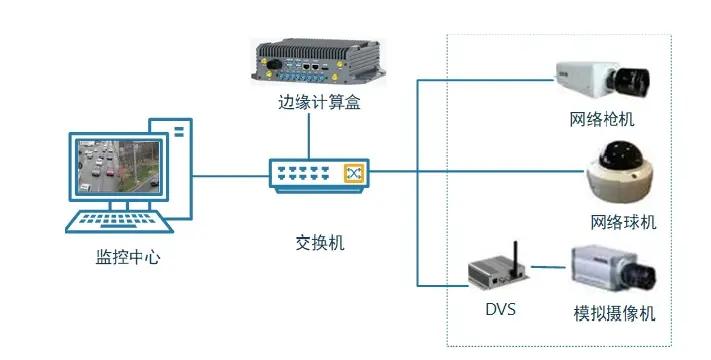
监控摄像头与监控中心在同一个局域网。
摄像头、边缘计算盒、监控中心电脑接入网络交换机。
AI算法部署在边缘计算盒。边缘计算盒分析视频的内容,并给到监控中心的应用层进行处理。
视频监控:分布式方案
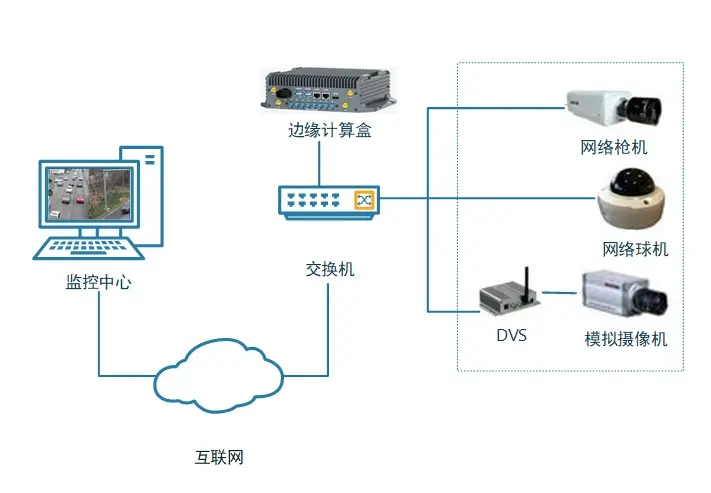
监控摄像头与中心相距很远,不在一个局域网,而且网络带宽有限。
建议采取分布式方案,边缘计算盒部署在摄像头附近,且在同一个局域网。
AI算法部署在边缘计算盒。边缘计算盒分析视频的内容,仅把分析结果通过互联网发给监控中心。监控中心的相关系统对结果进行处理。
视频监控:集中式方案
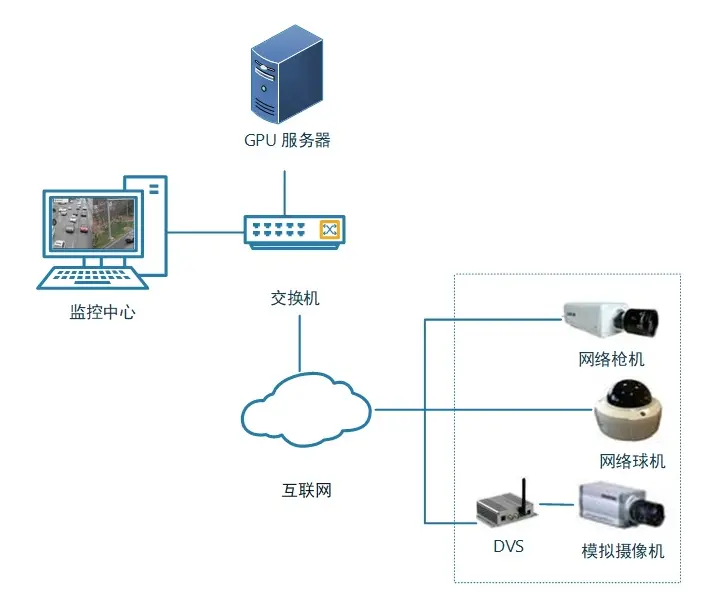
监控摄像头与中心相距很远,不在一个局域网,但网络带宽充裕。
在条件允许的情况,可以采取集中式方案。
GPU 服务器部署在监控中心,摄像头通过互联网与监控中心连通。
AI算法部署在GPU 服务器。 GPU 服务器拉取摄像头视频的内容,把分析结果给到监控中心的相关系统对结果进行处理。
车载应用:指挥调度、监控
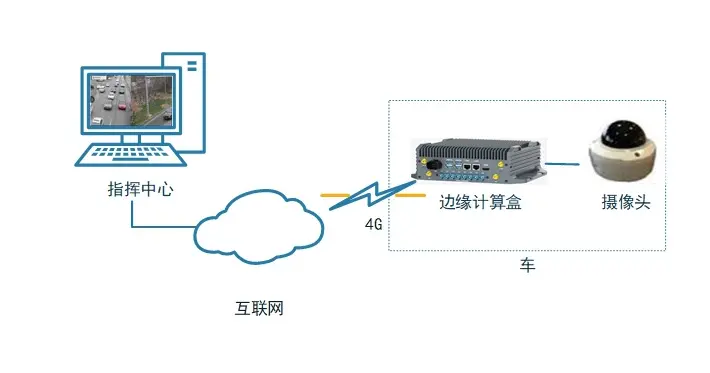
AI算法部署在边缘计算盒。
边缘计算盒与摄像头安装在车上。
摄像头与边缘计算盒通过局域网相连。
边缘计算盒分析摄像头视频内容,并通过4G网络将结果传回到指挥中心。
车载应用:车载应用
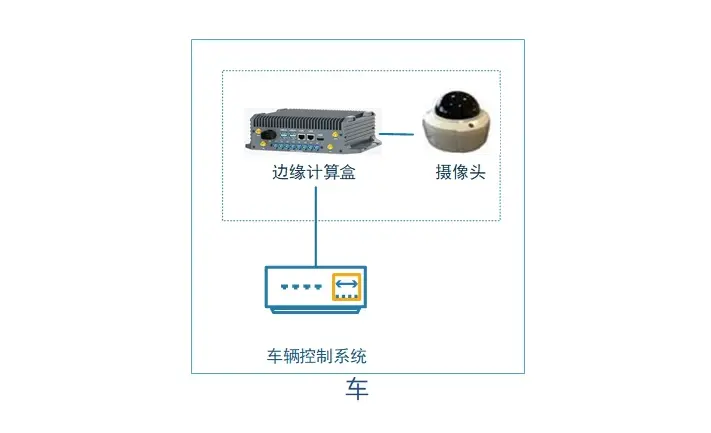
在特定场景(如厂区、仓库、车间)车的避障、自动跟随、疲劳驾驶告警,等自动驾驶辅助功能,采用如下方案。
AI算法部署在边缘计算盒。
边缘计算盒与摄像头安装在车上。
摄像头与边缘计算盒相连。
边缘计算盒分析摄像头视频内容,依据处理结果通过车辆控制系统做出相关处理例如停车、告警等。
机械控制

针对机械设备的控制可以采用如下方案。
AI算法部署在边缘计算盒。
边缘计算盒与摄像头安装在设备的合适位置。
摄像头与边缘计算盒相连。
边缘计算盒分析摄像头视频内容,依据处理结果通过设备控制系统控制设备。
无人机应用:无人机户外应用
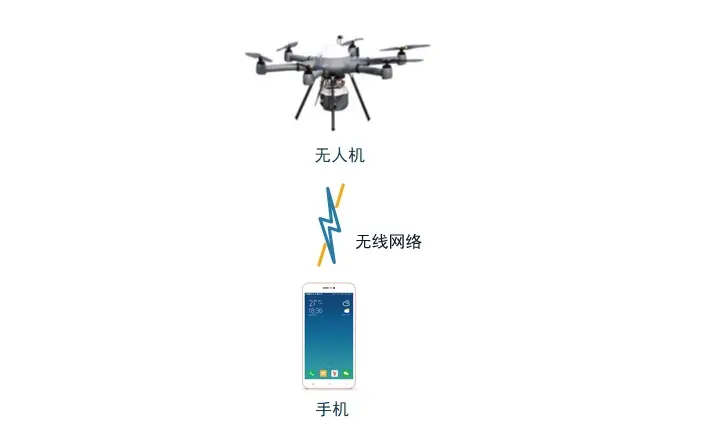
AI算法部署在手机。使用无人机的开发包(如 大疆 MobileSDK 手机端)获取无人机视频。AI算法识别视频里的内容并进行相关处理。
无人机应用:指挥调度、监控应用
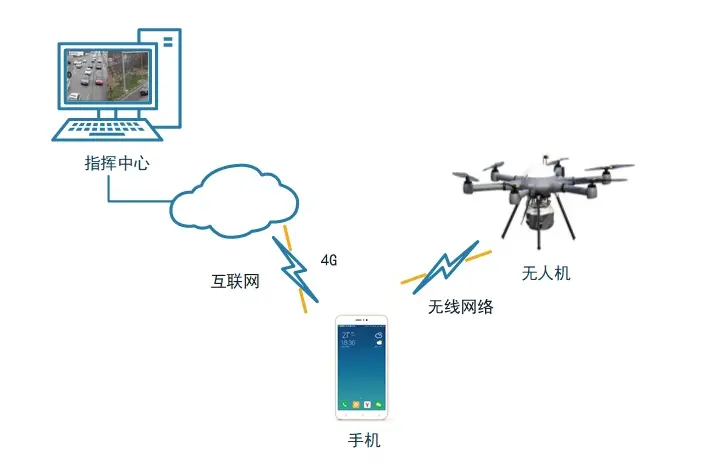
AI算法部署在手机。使用无人机的开发包(如 大疆 MobileSDK 手机端)获取无人机视频。AI算法识别视频里的内容并进行相关处理,并通过4G网络将结果传回到指挥中心。